|
Kevin Kim kimkj [at] usc [dot] edu I am a third-year undergraduate student at the University of Southern California, studying Computer Science and Applied Mathematics. My research is done under the guidance of Professors Erdem Bıyık and Daniel Seita. |

ResearchI am broadly interested in learning and decision making in robotics. |
|
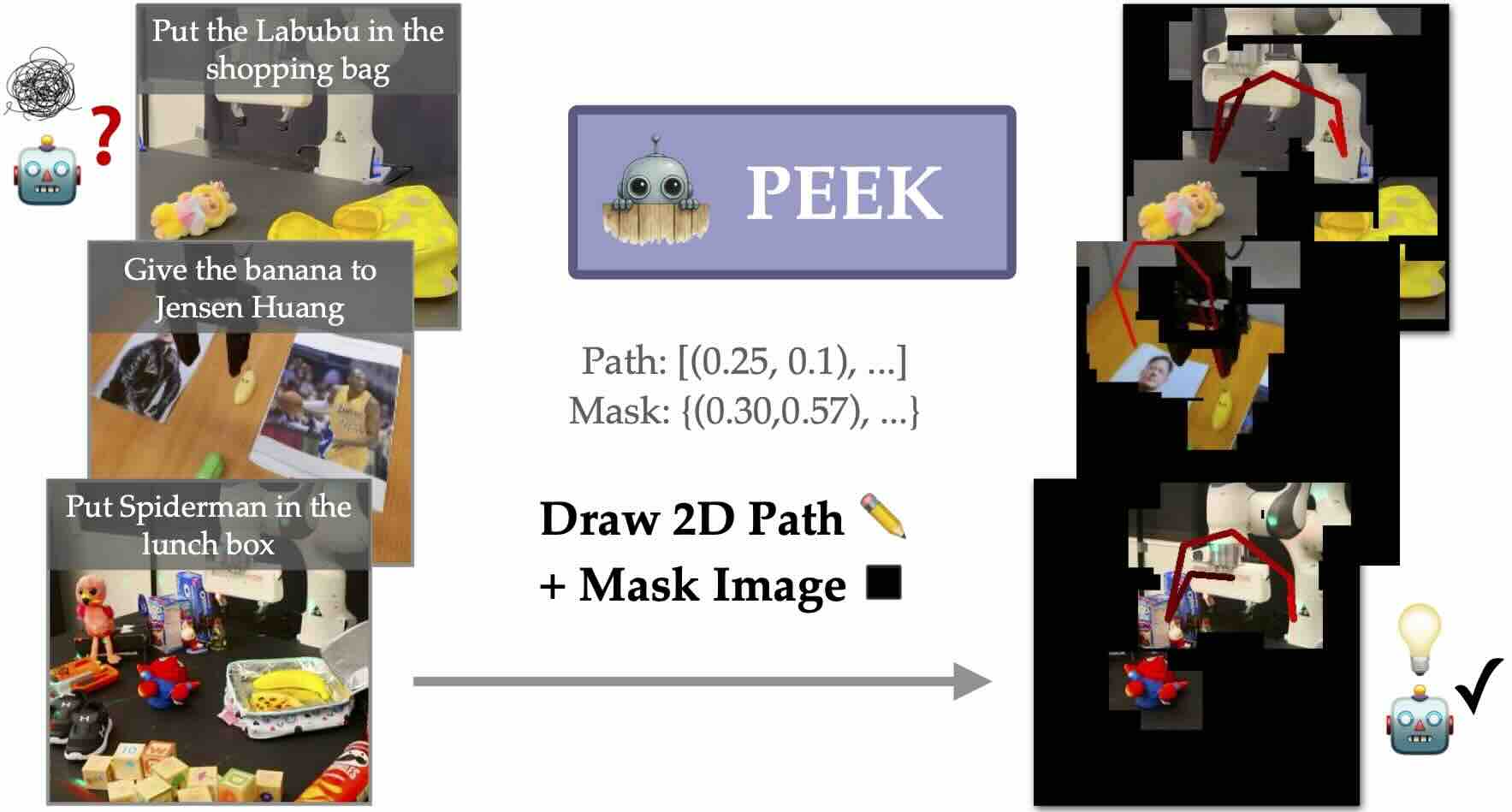
PEEK: Policy-agnostic Extraction of Essential Keypoints for Zero-Shot Generalization of Robot Manipulation Policies
Jesse Zhang*, Marius Memmel*, Kevin Kim, Dieter Fox, Jesse Thomason, Fabio Ramos, Erdem Bıyık, Abhishek Gupta, Anqi Li Under review at ICRA, 2025 project page / arXiv Policy-agnostic Extraction of Essential Keypoints for zero-shot robot manipulation. Fine-tunes VLMs to predict unified point-based intermediate representations: end-effector paths and task-relevant masks, enabling 41.4× real-world improvement for 3D policies. |

|
HAND Me the Data: Fast Robot Adaptation via Hand Path Retrieval
Matthew Hong, Anthony Liang, Kevin Kim, Harshitha Belagavi Rajaprakash, Jesse Thomason, Erdem Bıyık, Jesse Zhang 2025 project page / arXiv Fast robot adaptation via hand path retrieval from task-agnostic play data. Uses human hand demonstrations to retrieve relevant robot behaviors, enabling real-time learning of tasks in under four minutes with 2x improvement over baselines. |